
DrRobot Jaguar 4x4
The Jaguar 4x4 mobile platform is designed for both indoor and outdoor use, where terrain capabilities and maneuverability are required. The Jaguar-4x4-wheel platform is a wheeled version of the Jaguar-Lite platform. The Jaguar 4x4 wheel is driven by four powerful motors (80W), one for each wheel.
Robot Power-On Procedure
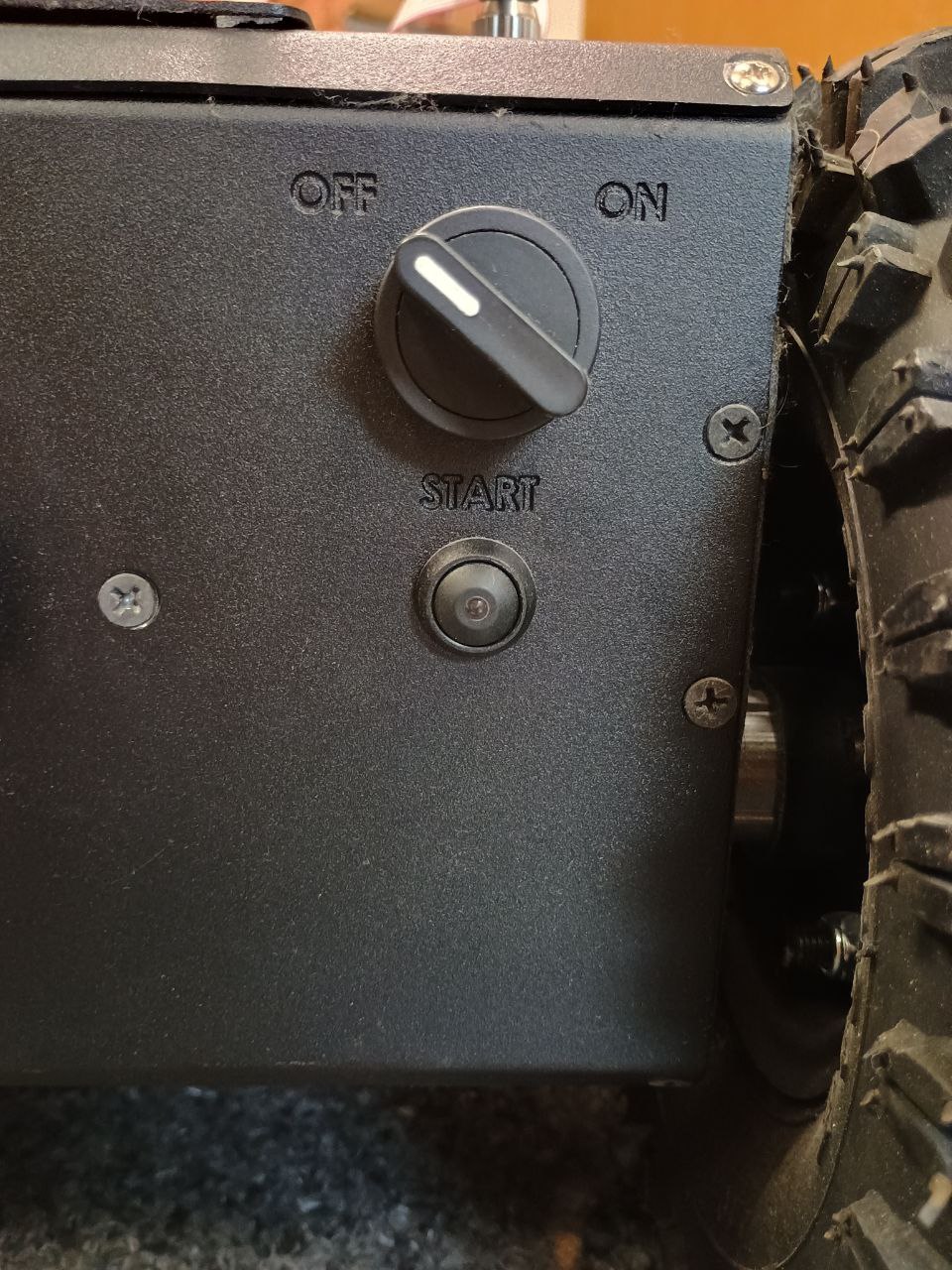 To power on the robot, set the switch to ON, then hold the START button until you hear the characteristic relay sound. The START button should light up green.
To power on the robot, set the switch to ON, then hold the START button until you hear the characteristic relay sound. The START button should light up green.

Communication with the Robot
To start communication with the robot, connect to its wifi network SSID: DriJaguar password drrobotdrrobot or connect an ethernet cable to the internal port. The device communicating with the Jaguar should have the IP 192.168.0.104. Communication is described in the robot's documentation.
ROS 1 Driver
The ROS 1 Driver is available on the department's GitHub jaguar_4x4_ros. A Dockerized version is available in the repository jaguar_4x4-docker.
RS242-TCP Converter Configuration
The RS424 to TCP converter configuration can be modified using the command telnet 192.168.0.60 9999. Link to configuration file