Install ROS 2
Install ROS 2 on your computer with
the official instruction..
Do not use ROS2 Jazzy and Iron!!!
Setup the L1.5 configuration
The ROS 2 communication in the laboratory is based on the FASTDDS ROS Middleware Implementation with
the discovery server running on the Denali.
Download the fastdds configuration file to the .ros directory.
wget denali.kcir.pwr.edu.pl/~jdelicat/files/fastdds.xml -O ~/.ros/fastdds.xml
Export the ROS 2 variables and set the FastDDS configuration.
export ROS_DISTRO=humble
If you are using
ROS 2 Foxy replace humble with foxy but the humble version is recommended.
export ROS_PACKAGE_PATH=/opt/ros/$ROS_DISTRO/share
export ROS_ROOT=/opt/ros/$ROS_DISTRO/share/ros
export ROS_DISCOVERY_SERVER=10.104.16.240:11811
export RMW_IMPLEMENTATION=rmw_fastrtps_cpp
export FASTRTPS_DEFAULT_PROFILES_FILE=/home/$USERNAME/.ros/fastdds.xml
source /opt/ros/$ROS_DISTRO/setup.bash
It is highly recommended to add this all commands to the
~/.bashrc file.
Restart the ROS 2 daemon:
ros2 daemon stop
ros2 daemon start
Test ROS 2 L1.5 setup
Now if any Pioneer is turned on you should see the /pioneer topics e. g.:
ros2 topic list
/diagnostics
/parameter_events
/pioneer2/battery_recharge_state
/pioneer2/battery_state_of_charge
/pioneer2/clutch
/pioneer2/cmd_vel
/pioneer2/joint_states
/pioneer2/laser_status
/pioneer2/odom/wheels
/pioneer2/robot_description
/pioneer2/robot_info
/pioneer2/scan
/pioneer2/user_stop
/pioneers/master_stop
/pioneers/restrictions
/rosout
/tf
/tf_static
L1.5 User safety plugin
To drive
Pioneers in the laboratory the user has to select and unlock the robot in the safety system.
Create the workspace.
sudo apt install python3-colcon-common-extensions
mkdir -p ~/safety_ws/src
cd ~/safety_ws
git clone https://denali.kcir.pwr.edu.pl/git/L1.5/ros2aria.git -b humble src/ros2aria
git clone https://denali.kcir.pwr.edu.pl/git/L1.5/safety_user_plugin.git -b ros2-development src/safety_user_plugin
Build the workspace.
source /opt/ros/$ROS_DISTRO/setup.bash
colcon build --packages-select safety_user_plugin ros2aria_msgs
source install/setup.bash
ros2 run safety_user_plugin user_plugin_node
After that the user safety system should appear.
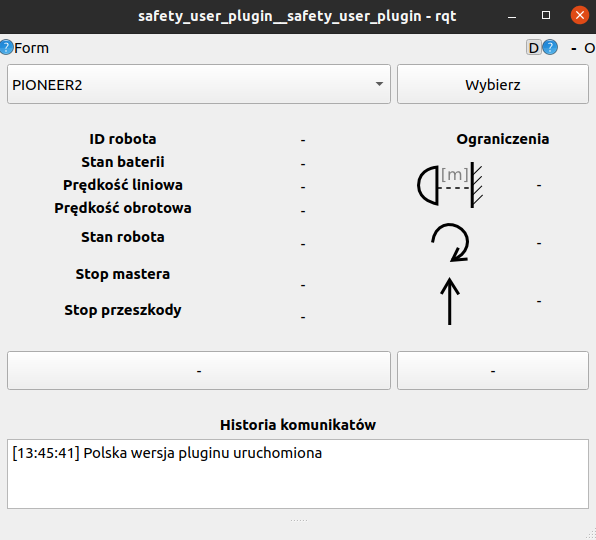
Now it is possible to select the robot.
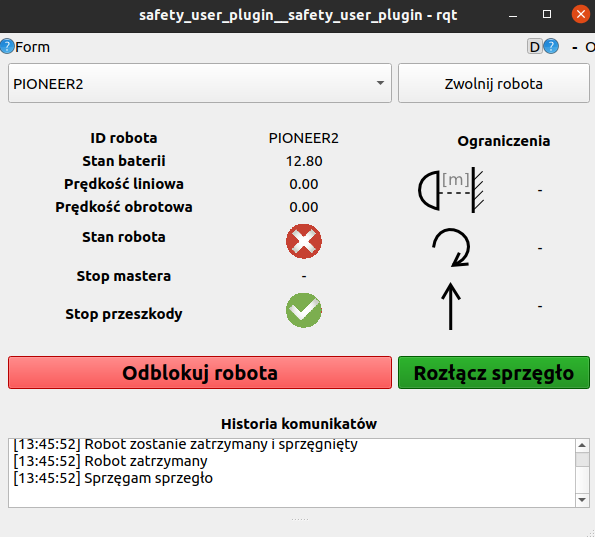
Make sure that the teacher enabled the robots.